友情链接:
随着科技的飞速发展,人形机器人不再仅仅是科幻作品中的想象,正逐步走进现实。从科研实验室到工业生产车间,从服务领域到家庭场景,人形机器人的身影越来越常见。它们在诸多领域展现出独特的应用潜力,成为推动各行业变革的重要力量。而在人形机器人的众多关键技术中,高精度力控关节无疑是最为核心的部分之一,它就如同人类的关节一样,赋予了机器人灵活、精准的运动能力,是实现人形机器人复杂动作和人机协作的关键所在 ,也因此成为了当前科技领域的研究热点与发展焦点。
一、高精度力控关节:人形机器人的核心 “关节”

在人形机器人的庞大技术体系中,高精度力控关节占据着举足轻重的地位,堪称人形机器人的核心 “关节”。从结构和功能上看,它与人类的关节有着诸多相似之处,却又融入了先进的科技元素,为机器人赋予了独特的运动能力 。
人类的关节,如膝关节、肩关节等,是身体运动的枢纽,它们不仅连接着骨骼,还能在肌肉的驱动下,实现各种复杂而灵活的动作,比如行走、奔跑、抓取、挥舞等。而且,人类关节具备出色的力感知能力,能够根据不同的任务和环境,自动调整力量的大小和方向,以完成精准的操作。比如,我们在拿起一个易碎的玻璃杯时,手部关节能精准感知所需的力度,既不会用力过猛捏碎杯子,也不会因为力量不足而让杯子滑落;在进行书法创作时,手腕关节能灵活控制毛笔的力度和角度,写出优美的笔画。
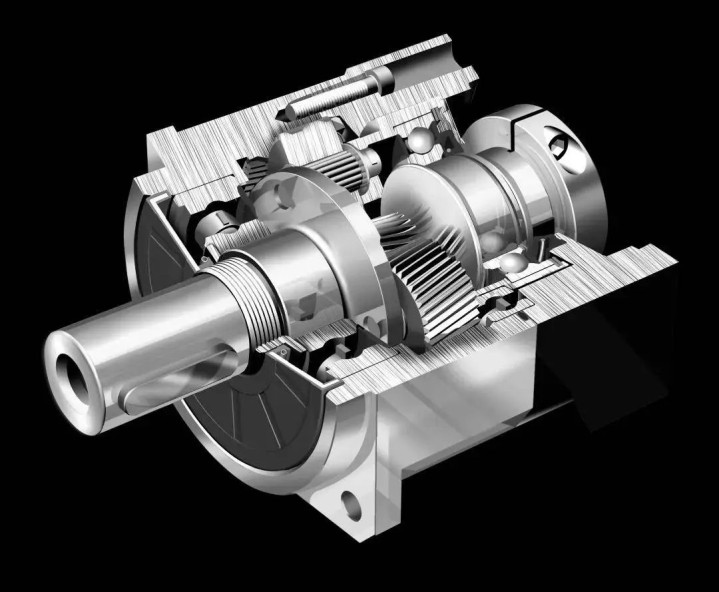
人形机器人的高精度力控关节,同样肩负着连接机器人肢体部件、实现运动传递的重任。它一般集成了电机、减速器、编码器、力传感器等多种关键部件,是一个高度集成化的机电一体化模组 。电机为关节提供动力,就如同人类的肌肉提供力量;减速器能够降低电机的转速,同时放大扭矩,使机器人的动作更加稳定和有力;编码器则用于精确测量关节的位置和角度,为机器人的运动控制提供准确的数据反馈;力传感器的作用至关重要,它能实时感知关节所受到的力和力矩,让机器人具备力感知和力控制的能力,这也是高精度力控关节的核心所在。
以特斯拉的 Optimus 人形机器人为例,其在关节设计上采用了先进的力控技术,通过在每个线性关节和旋转关节上分别放置一维压力传感器和一维力矩传感器,实现了高精度的运动控制。这使得 Optimus 能够在复杂的环境中,如在家庭场景中进行物品搬运时,精准控制手臂关节的力量,拿起不同重量、不同材质的物品,避免对物品造成损坏;在与人协作完成任务时,也能根据人类伙伴的动作和力量反馈,实时调整自身关节的力量和运动,实现安全、自然的人机协作。
高精度力控关节对于人形机器人的运动灵活性、精准度和交互能力起着决定性的作用。在运动灵活性方面,它能够实现多自由度的运动,使机器人的肢体能够像人类一样灵活转动和弯曲,完成各种复杂的动作组合。比如,一些人形机器人可以借助高精度力控关节,完成舞蹈动作,它们的关节能够快速、流畅地切换运动方向和角度,展现出优美的舞姿,这在以往缺乏高精度力控关节的机器人中是难以实现的。
在运动精准度上,高精度力控关节凭借其精确的力感知和控制能力,能够将机器人的运动误差控制在极小的范围内。无论是进行微小零件的精密装配,还是在手术中协助医生进行精准操作,高精度力控关节都能确保机器人的动作精准无误。例如,在电子制造领域,人形机器人利用高精度力控关节,可以准确地将微小的电子元件放置在指定位置,其精度能够达到毫米甚至微米级别,大大提高了生产效率和产品质量。
而在交互能力方面,高精度力控关节让人形机器人能够更好地与人类、环境进行互动。当机器人与人接触时,它可以通过力传感器感知到人类施加的力量,从而做出相应的反应,实现友好、安全的人机协作。比如在康复护理场景中,人形机器人能够根据患者的力量反馈,辅助患者进行康复训练,既给予患者适当的支持,又不会对患者造成伤害;在服务场景中,机器人可以与人类进行自然的肢体互动,如握手、引导等,增强服务的亲和力和体验感。
二、技术突破:解锁机器人的 “灵动密码”

(一)核心零部件的革新
在人形机器人高精度力控关节的发展进程中,核心零部件的技术革新起到了基石性的作用。作为动力源的电机,正朝着高性能、小型化的方向大步迈进。以无框力矩电机为例,它在人形机器人关节驱动中逐渐成为主流选择。这种电机具备体积小、功率高、低转速输出大扭矩等显著特性,能够为机器人关节提供强劲且精准的动力支持 。
从数据上看,相较于传统电机,无框力矩电机的扭矩密度提升了 30% - 50%,功率密度也有 20% - 30% 的显著增长 。像信质集团通过不断优化无框力矩电机产品,满足了日益增长的市场需求,在具身机器人领域展现出强大的技术实力,其研发的无框力矩电机能使机器人的运作效率提高 30% 以上,同时降低能耗约 20% ,大大增强了机器人在复杂任务中的执行能力和能源利用效率。
减速器作为连接电机与负载的关键部件,直接影响着机器人关节的传动效率、精度和稳定性。新型减速器在设计和制造工艺上不断创新,在减小体积的同时,大幅提升了传动效率。例如,海曼传动公司发布的 2024 年新款行星齿轮减速机,采用了先进的设计和制造工艺,使得其传动效率比传统产品提高了 30% 。中大力德研发的减速机,通过独特的结构设计,实现了结构紧凑、体积较小的优势,并且由于摆线减速机构中各个构件的有效接触更多,传动效率更为理想,为机器人关节的小型化和高效运作提供了有力保障 。
编码器用于精确测量关节的位置和角度,是实现高精度运动控制的关键反馈元件。如今,多圈绝对式编码器凭借其高精准性、可靠性、耐用性等优点,在人形机器人中得到广泛应用。它能够实时、准确地反馈关节的位置信息,即使在掉电或复杂环境下,也能确保机器人对关节位置的精确感知,为后续的运动控制提供稳定、可靠的数据基础,从而让机器人的动作更加精准、流畅。
控制器则如同机器人关节的 “大脑”,负责协调各个部件的工作,实现对关节力和运动的精确控制。随着芯片技术和控制算法的不断进步,控制器的运算速度和控制精度大幅提升。一些先进的控制器采用了多核处理器和专用的控制芯片,能够快速处理大量的传感器数据,并根据预设的算法实时调整电机的输出,实现对关节力的精准调控,使机器人能够在复杂的任务和环境中,迅速、准确地做出动作反应 。
(二)力觉感知技术的飞跃
力觉感知技术是高精度力控关节的 “触觉神经”,赋予了人形机器人感知外界力和力矩的能力,使其能够实现更加安全、自然的人机交互和复杂任务操作 。其中,六维力传感器和关节扭矩传感器是力觉感知技术的关键代表。
六维力传感器,又称六维力 / 力矩传感器或六轴力传感器,能够同时测量三个力分量(Fx、Fy、Fz)和三个力矩分量(Mx、My、Mz) 。其核心结构通常由弹性体、应变片(或压电晶体等敏感元件)、电路部分及信号处理单元组成 。当外力作用于弹性体时,应变片会发生形变,从而改变其电阻值,进而通过电路转换和信号处理,得到精确的力和力矩信息 。近年来,六维力传感器在结构设计、材料选择和信号处理算法等方面都取得了显著突破。在结构设计上,通过优化弹性体的形状和布局,有效提高了传感器的灵敏度和抗过载能力,减少了维间耦合误差,改善了动态性能 。
在材料方面,硅应变片因其优异的稳定性、信噪比和动态特性,逐渐成为主流选择。尽管金属应变片在成本上略有优势,但硅应变片的工艺提升和成本降低使其综合性能更加优越 。此外,压电晶体、光学式以及电容式等新型敏感元件也在六维力传感器中得到了应用,进一步丰富了传感器的种类和性能 。在信号处理算法方面,动态补偿滤波器、遗传算法、神经网络算法等智能算法被广泛应用,能够有效地处理多通道信号的温漂、蠕变、交叉干扰等问题,大幅提高了传感器的测量精度和稳定性 。这些技术突破使得六维力传感器能够更加精准、快速地感知外界的力和力矩变化,为人形机器人在精密装配、抓取物体、人机协作等任务中的应用提供了坚实的技术支撑 。
关节扭矩传感器则专注于测量关节处的扭矩,它直接安装在关节部位,能够实时监测关节在运动过程中的受力情况。一些新型的关节扭矩传感器采用了先进的磁电感应技术或光纤传感技术,具有更高的精度和更快的响应速度 。比如,某些关节扭矩传感器的测量精度可以达到 ±0.1% FS(满量程),响应时间能够缩短至 1ms 以内 ,这使得机器人能够及时感知关节扭矩的微小变化,并迅速做出相应的调整,有效避免了因扭矩过大或过小而导致的运动失误或设备损坏,极大地提升了机器人运动的安全性和可靠性 。
(三)智能控制算法的升级
智能控制算法是高精度力控关节的 “智慧引擎”,它决定了机器人如何根据力觉感知信息和任务需求,精确地控制关节力,实现各种复杂的动作和任务 。随着人工智能技术的飞速发展,人形机器人的智能控制算法不断升级,从传统的基于模型的控制方法向基于数据驱动和深度学习的智能控制方法转变 。
在传统的控制方法中,通常需要建立精确的机器人动力学模型,通过求解模型来计算关节的控制量 。然而,人形机器人的动力学模型非常复杂,且在实际运行过程中会受到多种因素的干扰,如摩擦力、负载变化等,导致模型的准确性难以保证 。为了解决这些问题,基于深度学习的运动技能学习方法应运而生 。这种方法通过让机器人在大量的仿真环境或实际场景中进行学习和训练,自动提取和总结运动模式和规律,从而实现对复杂任务的自主学习和执行 。
例如,波士顿动力的 Atlas 机器人,通过强化学习算法,能够在复杂的地形上实现稳定的行走、奔跑和跳跃,还能完成开门、搬运物体等复杂任务 。它在训练过程中,不断尝试不同的动作策略,并根据环境反馈的奖励信号来调整策略,逐渐学会了如何在各种复杂情况下保持平衡和完成任务 。在人机协作场景中,基于深度学习的力控制算法可以让机器人根据人类伙伴的动作和力量反馈,实时调整自身关节的力量和运动轨迹,实现自然、流畅的协作 。比如,在工业装配线上,机器人能够与工人协同工作,根据工人的操作节奏和力度变化,灵活地调整自己的动作,共同完成产品的装配任务,大大提高了生产效率和协作的安全性 。
三、产业化进展:从实验室到市场的跨越
(一)产业链上游:核心零部件的国产化替代
产业链上游作为人形机器人产业的根基,核心零部件的国产化替代进程备受瞩目,这不仅是产业自主可控的关键,更是降低成本、提升产业竞争力的重要途径。
在减速器这一关键领域,国产企业已取得显著突破。以谐波减速器为例,全球市场长期被日本的哈默纳科垄断,但国内的绿的谐波凭借多年的技术研发与创新,成功打破了这一局面。绿的谐波每年将超过 10% 的营收投入研发,不断完善新一代谐波啮合 “P 齿形” 设计理论体系等核心技术 。其产品性能卓越,与国外同类产品相比,P 齿形齿高较低却能承受较大扭矩,齿宽较大有效降低了断裂失效风险,同时大幅提升了柔轮寿命 。在市场份额方面,绿的谐波在国内谐波减速器市场占有率超过 25%,成为国内第一大厂;在全球市场,其市占率也位居第二 。随着人形机器人市场的快速发展,预计单台人形机器人主要关节用谐波减速器的数量为 9 - 14 个,绿的谐波无疑将迎来更广阔的市场空间 。
传感器作为人形机器人感知外界环境的关键部件,国产化进程同样取得了进展。在六维力传感器领域,宇立仪器、坤维科技等企业已实现量产,打破了国外的技术垄断。宇立仪器的六维力传感器采用了先进的弹性体结构设计和高精度应变片,具有高精度、高灵敏度、低噪声等优点,能够精确测量力和力矩的六个分量,广泛应用于人形机器人的精密操作和人机协作场景 。在视觉传感器方面,奥比中光的 3D 传感器在服务机器人领域市占率超 70%,为国产视觉传感器在人形机器人中的应用奠定了基础 。汉威科技、柯力传感等中国企业也在积极布局柔性触觉材料,推动触觉传感器的国产化替代 。
电机与驱动系统是机器人运动控制的核心,国内企业如步科股份、昊志机电等正加速追赶国际先进水平。2024 年国内无框电机市场规模达 48 亿元,尽管高端编码器仍依赖海德汉(德国)、多摩川(日本)等进口,但奥普光电(禹衡光学)已实现 7.7% 的国内市场份额,成为国产替代的先锋 。空心杯电机应用于灵巧手的高精度操作,瑞士 Maxon 与德国 Faulhaber 占据全球 70% 市场,而国内鸣志电器、鼎智科技已推出应用于医疗与军工领域的产品,兆威机电更在 CES 2025 展出 17-20 自由度灵巧手,推动了相关技术的降本和应用拓展 。
(二)产业链中游:本体制造与系统集成的发展
产业链中游的本体制造与系统集成是将各种核心零部件整合为一个完整、高效人形机器人的关键环节,国内众多企业在这一领域积极探索,取得了令人瞩目的成果。
宇树科技在人形机器人本体设计方面独树一帜,其推出的 Unitree H1 和 G1 系列人形机器人备受关注 。Unitree H1 具备出色的动力性能与灵巧操作能力,通过国产化零部件的应用,成功将成本压缩至 20 万元以内 。它配备了先进的力控灵巧手,结合力位混合控制技术,能够模拟人手对物体进行精准操作 。在运动控制方面,宇树科技与上海 AI 实验室等联合研发的 BeamDojo 强化学习框架,赋予了 H1 在极端地形下的自主移动能力,使其可以在类似梅花桩、平衡木等极端环境中自主移动,成功率高达 80% 。G1 人形机器人同样表现出色,其售价 9.9 万元起,具有高灵活性的关节和强大的扭矩,能够实现超高精度的操作 。它还配备了 360 度视野的激光雷达和深度摄像头,具备强大的环境感知能力 。G1 不仅在国内市场受到关注,还通过京东等电商平台销售至海外,赢得了包括海外博主在内的广泛关注 。
优必选作为人形机器人领域的领军企业,在本体设计和系统集成方面展现出强大的实力 。其 Walker 系列机器人凭借先进的伺服驱动技术和独特的本体设计,在全球范围内获得了高度认可,拥有的专利数量位居全球第一 。以 Walker S1 为例,它在工业场景中表现出色,具备跨场域纯视觉感知技术,能够实现动态目标跟踪和机器人群体的持续感知与环境适应 。多机协同控制系统使其能够精确完成复杂轨迹规划,确保任务完成的高可靠性 。具备触觉反馈的五指灵巧手则让 Walker S1 在处理微米级柔软物体时展现出非凡的能力,保证了物体在抓取和移动过程中的无损伤 。优必选还引入了群体智能技术,通过自主研发的人形机器人群脑网络(BrainNet)架构和人形智能网联中枢(Internet of Humanoids, IoH),使得数十台 Walker S1 型机器人能够在复杂工业环境中实现有效的协同作业 。目前,Walker S1 已进入多家工厂进行实训工作,并获得了批量订单,与东风柳汽、吉利汽车、一汽 - 大众等多家知名汽车厂家展开了合作 。
(三)产业链下游:应用场景的拓展与商业化落地
产业链下游的应用场景拓展与商业化落地是人形机器人产业发展的最终目标,也是检验技术成熟度和市场接受度的关键环节。当前,人形机器人在工业、医疗、养老、物流等领域的应用正不断深化,尽管面临诸多挑战,但也蕴含着巨大的发展机遇 。
在工业领域,人形机器人凭借其灵活的动作和协作能力,逐渐应用于汽车制造、电子装配等生产线。优必选与富士康合作完成的首期 “具身智能机器人技能实训”,验证了人形机器人在精密装配、物流搬运等任务中的可行性 。在汽车制造中,人形机器人可以完成零部件的搬运、装配等工作,提高生产效率和质量;在电子装配中,能够实现对微小电子元件的精准操作,减少人工误差 。然而,工业场景对机器人的稳定性、可靠性和精度要求极高,目前人形机器人在复杂工业环境中的适应性和长时间连续工作能力仍有待提高 。
在医疗领域,人形机器人的应用前景广阔,可用于手术辅助、康复护理等场景。优必选与深圳医院合作研发的手术辅助机器人,集成了六维力传感器与视觉导航系统,能够协助医生进行更精准的手术操作 。傅利叶智能的 GR1 人形机器人专为康复护理设计,配备高精度力控关节,可辅助中风患者进行居家康复训练,通过 AI 算法动态调整训练强度,减轻护工的体力劳动 。但医疗行业对安全性和准确性的严格标准,使得人形机器人的审批和推广面临较大的监管压力,同时,如何与医疗人员实现高效协作也是需要解决的问题 。
养老领域是人形机器人的重要应用方向之一,随着人口老龄化的加剧,对养老服务的需求不断增加,人形机器人可以在陪伴、健康监测、生活辅助等方面发挥作用 。日本软银的 Pepper 机器人已进入养老院试点,国内康力优蓝、傅里叶智能等企业也推出了相关产品 。例如,宇树科技的 H1 机器人未来计划扩展至家庭养老场景,协助失能老人完成起身、行走等动作,并通过远程连接功能让子女实时查看老人状态 。但目前人形机器人在养老领域的应用还面临成本较高、情感交互不够自然等问题,需要进一步优化技术和降低成本 。
在物流领域,人形机器人通过视觉识别与力控抓取,在仓储分拣中展现出替代传统 AGV 的潜力 。京东物流 2024 年部署了 500 台人形机器人进行试点,顺丰与优必选联合开发末端配送方案 。人形机器人能够在复杂的物流环境中灵活穿梭,完成货物的搬运和分拣任务,提高物流效率 。然而,物流场景的多样性和复杂性对机器人的导航、识别和操作能力提出了很高的要求,同时,如何与现有物流系统无缝对接也是商业化落地的关键 。
四、挑战与展望:未来之路,机遇与挑战并存

(一)现存挑战剖析
尽管人形机器人高精度力控关节技术取得了显著的突破,产业化进程也在稳步推进,但目前仍面临着诸多挑战,这些挑战制约着人形机器人的大规模普及和应用 。
成本问题是阻碍人形机器人发展的一大关键因素。高精度力控关节的核心部件,如高性能的电机、精密减速器、先进的传感器等,其研发和生产成本居高不下 。以无框力矩电机为例,虽然其性能卓越,但由于技术门槛高,生产工艺复杂,导致价格相对昂贵 。在减速器方面,尽管国内企业在国产化替代上取得了一定成果,但与国外先进产品相比,在精度保持、寿命等方面仍存在差距,且部分高端减速器仍依赖进口,进一步增加了成本 。据估算,目前高精度力控关节的成本占人形机器人总成本的 30% - 50% ,这使得人形机器人的整体售价难以降低,限制了其市场推广和应用范围 。
可靠性和稳定性也是亟待解决的重要问题。在复杂的实际应用环境中,人形机器人需要长时间稳定运行,这对高精度力控关节的可靠性提出了极高的要求 。然而,当前部分核心部件的可靠性仍有待提高,例如,一些关节扭矩传感器在长期使用过程中可能出现精度漂移的问题,影响机器人对关节力的精确感知和控制 。此外,不同品牌和型号的核心部件之间的兼容性和协同工作能力也存在不足,这增加了系统集成的难度和风险,降低了机器人整体的可靠性和稳定性 。
在技术标准方面,目前人形机器人高精度力控关节领域缺乏统一的技术标准和规范 。不同企业生产的产品在接口、通信协议、性能指标等方面存在差异,这导致了产业链上下游之间的协作困难,增加了研发成本和时间 。例如,在系统集成过程中,由于各部件接口不兼容,需要进行大量的适配和调试工作,不仅降低了生产效率,还可能影响系统的性能和稳定性 。缺乏统一标准也不利于行业的健康发展,阻碍了技术的交流与共享,限制了市场的规范化和规模化 。
(二)未来发展趋势
尽管面临挑战,但人形机器人高精度力控关节技术的未来发展前景依然十分广阔,呈现出诸多令人期待的趋势 。
随着人工智能技术的不断发展,多模态感知与具身智能的融合将成为未来人形机器人高精度力控关节技术的重要发展方向 。多模态感知技术能够让机器人同时获取视觉、听觉、触觉、力觉等多种信息,更加全面、准确地感知周围环境 。具身智能则强调机器人通过身体与环境的交互来实现智能行为,将感知、决策和行动紧密结合 。未来,高精度力控关节将与多模态感知和具身智能技术深度融合,使机器人能够根据丰富的环境信息,实时、准确地调整关节力和运动,实现更加复杂、智能的任务 。例如,在救援场景中,机器人可以通过视觉感知废墟中的环境,利用力觉感知来操控机械臂,精准地搬开障碍物,解救被困人员 。
未来,人形机器人有望在更多领域得到广泛应用 。在工业领域,除了现有的汽车制造、电子装配等场景,人形机器人还将在航空航天、船舶制造等高端制造业中发挥重要作用,实现更加灵活、高效的生产作业 。在医疗领域,除了手术辅助和康复护理,人形机器人还可能用于远程医疗、药物配送等环节,为患者提供更加便捷、优质的医疗服务 。在日常生活中,人形机器人将逐渐走进家庭,成为家庭助手,帮助人们完成家务劳动、照顾老人和儿童等任务,极大地提高人们的生活质量 。随着应用场景的不断拓展,人形机器人高精度力控关节技术也将在实践中不断优化和完善 。
人形机器人的发展将对人类生活和社会产生深远的影响 。在就业结构方面,虽然人形机器人的应用可能会取代一些重复性、危险性高的工作岗位,但同时也会创造出一系列新的就业机会,如机器人研发、维护、编程、管理等 。这就要求人们不断提升自身的技能和素质,以适应新的就业需求 。在社会伦理方面,人形机器人的普及引发了一系列伦理问题的讨论,如机器人的权利和责任、人机关系的界定、隐私保护等 。未来,需要建立相应的法律法规和伦理准则,规范人形机器人的设计、生产和应用,确保其安全、可靠地服务于人类社会 。从更宏观的角度看,人形机器人的发展将推动人类社会进入一个全新的智能时代,改变人们的生活方式和社会运行模式,为人类的发展带来更多的机遇和可能 。
上一篇:重磅!最难收全的南宋铁钱
下一篇:微商爆买的豪车跌落神坛